# Region Proposal Network
# 1.Regionn Proposal Network背景
RPN,Region Proposal Network是中科大与微软亚洲研究院联合培养博士,原Momenta研发总监任少卿与何凯明,Ross Girshick共同发表的论文Faster R-CNN (opens new window)中提出的一个网络结构,用于目标检测,RPN论文最早发表于2015年06月04号,是在Fast RCNN (opens new window)上的改进,与其一起提出的Translation-Invariant Anchors极大的提高的检测的性呢和准确度。Faster R-CNN使用RPN和anchors替代RCNN和Fast RCNN中的selective search方法,Faster R-CNN将检测问题分成了特征提取backcbone的训练和RPN候选框生成网络的训练,因此是Two Stage检测框架。RPN用于生成Proposal Boxes, 以用来输入ROI Pooling和ROI Align,做进一步的类别判断和检测框定位。
因RPN是Faster R-CNN中提出的,先来看下Faster R-CNN的整体结构:
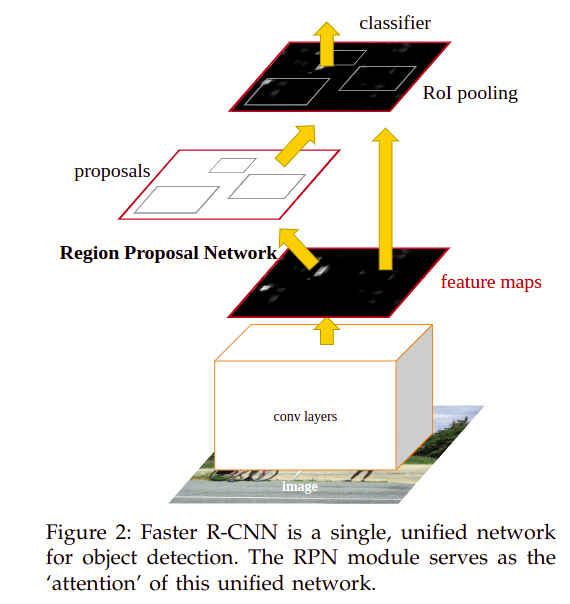
上图中,可以看到,对于输入的图像,先经过Conv Layers进行特征提取得到feature map,再将feature map一支用于输入RPN结合anchors来生成Proposal Boxes,另一支feature map和RPN生成的Proposal boxes一起输入ROI Pooling,经过全连接层后做检测物体类别的回归和检测框的精细化定位。从上图中可以知道,RPN网络的作用就是输入feature map,输出Proposal Boxes,在进行检测网络整体训练之前,需基于现有的Model先训练RPN网络,使其能够用来生成Proposal Boxes,然后再训练Model,循环3次。
# 2.Regionn Proposal Network的结构

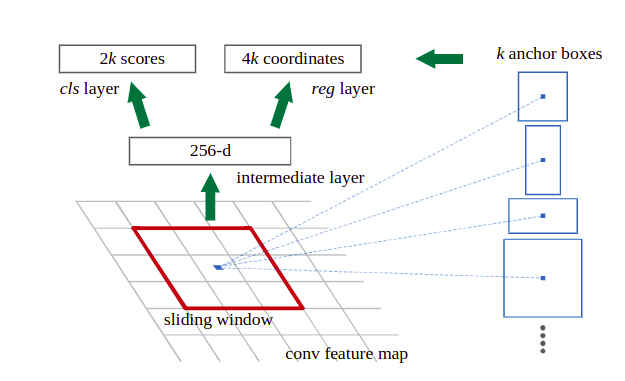
如图,这是目前R-CNN衍生出来的检测算法都会使用的RPN Head的网络结构,用来生成Proposal Boxes,并判断其中是否包含物体,输出每个Proposal Boxes的置信度。结合上图,介绍一下rpn网络的结构,RPN网络的输入是backbone提取得到的feature map(NCHW),网络结构中先有一个3x3的卷积,进一步融合特征,然后将卷积结果分别输入到两个分支上。每个分支都包含一个1x1的卷积,只改变输入特征图的通道大小,不改变feature map的宽高。其中一支负责预测anchors偏移量,输出通道数变为num_anchors*box_dims,关于anchors的介绍见下一部分。另一支负责预测每个proposal boxes的置信度,其输出通道数为num_anchors。因总的proposal boxes数里过多,得到置信度和proposal boxes对应的位置后,可据此对proposal boxes进行过滤,正是图中proposals层做的事情,其介绍见图2,这里是以一个feature map进行说明的,对于FPN结构的网络,对不同层级的特征分别进行处理即可。代码实现可以参考detectron2 (opens new window)
class StandardRPNHead(nn.Module):
def forward(self, features: List[torch.Tensor]):
"""
Args:
features (list[Tensor]): list of feature maps
Returns:
list[Tensor]: A list of L elements.
Element i is a tensor of shape (N, A, Hi, Wi) representing
the predicted objectness logits for all anchors. A is the number of cell anchors.
list[Tensor]: A list of L elements. Element i is a tensor of shape
(N, A*box_dim, Hi, Wi) representing the predicted "deltas" used to transform anchors
to proposals.
"""
pred_objectness_logits = []
pred_anchor_deltas = []
for x in features:
t = self.conv(x)
pred_objectness_logits.append(self.objectness_logits(t))
pred_anchor_deltas.append(self.anchor_deltas(t))
return pred_objectness_logits, pred_anchor_deltas
文件proposal_uitls.py文件中定义的find_top_rpn_proposals函数对RPN生成的proposal boxes做了过滤。其过程分成三步:
graph TD
subgraph find_top_rpn_proposals_method
A(1.在每个图像上对每个level的anchor取其topk score) ---> B(2.将每张图像对应每个level的topk proposal box合在一起,维护level_idxs)
B-->C(3.每个图像的topk proposal box按在各自所属level上NMS)
C -->D[因此RPN输出的proposal box已不存在feature level信息]
end
# 3.Anchors
‵Anchors是Faster RCNN论文中提出的用来更好的回归bounding boxes`的算法。
_C.MODEL.ANCHOR_GENERATOR.SIZES = [[32, 64, 128, 256, 512]]
# Anchor aspect ratios. For each area given in `SIZES`, anchors with different aspect
# ratios are generated by an anchor generator.
# Format: list[list[float]]. ASPECT_RATIOS[i] specifies the list of aspect ratios (H/W)
# to use for IN_FEATURES[i]; len(ASPECT_RATIOS) == len(IN_FEATURES) must be true,
# or len(ASPECT_RATIOS) == 1 is true and aspect ratio list ASPECT_RATIOS[0] is used
# for all IN_FEATURES.
_C.MODEL.ANCHOR_GENERATOR.ASPECT_RATIOS = [[0.5, 1.0, 2.0]]
如上代码中,分别是5种size,3种宽高比的Anchors配置,Anchors的大小是在检测输入图像的尺度上的,通过变换可知对于每个点共有15种不同宽高比和大小的anchors,
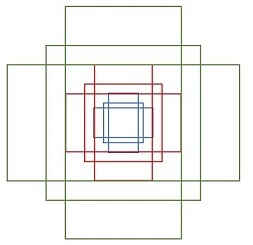
Anchors是作用在feature map上的每个cell中心点的,再根据图像信息和特征提取网络的stride,找到原图上Anchors的对应位置。其应用可以参考faster rcnn论文的一个图,
使用Anchors时,bounding boxes回归的原理是anchors的中心bounding box。给定F可以表示为:
- 先平移
- 再缩放
其中anchor与gt box相差很小时,可看成线性变换即Y=WX。

上图种蓝色的网格表示feature map特征图,在其中间一个cell上生成的一个Anchor如图中黄色框所示,其中心cell的中心对应的原图上的坐标,与当前这个对应IoU最大的ground truth box如图中红色的框,其中心坐标为Anchor只是大概定位了检测框的位置,还需对其进行少量的平移才能实现准确定位。同样Anchor也只是大概确定了检测框的宽高,还需在宽高方向上进行适量的缩放才能得到准确的检测框。
faster rcnn中的偏移量预测是tx,没有范围限制,容易导致产生超出边界的预测框,在2016年12月25号Joseph Redmon发表的Yolov2中对其进行了修改,改成了在预测相对于featue map cell左上点的偏移量,并做sigmoid,使得偏移量始终在
对于检测网络训练时,传入A与Ground Truth Boxes之间的变换量L1损失函数回归Y=WX函数即可完成RPN的训练。
# 4.Regionn Proposal Network的训练
训练RPN网络时,需先将feaure map经过RPN前向推理得到shape=(N, Hi*Wi*A)的pred_objectness_logits scores和shape=(N, Hi*Wi*A, B)的pred_anchor_deltas。然后将shape = [N, H*W*A]的anchors和shape=[N, M, B]的ground truth boxes对应起来,再计算含有物体的positive target anchors和predicted anchors之间的定位损失及positive and negative target anchors和对应predicted anchors之间的分类损失。
训练RPN网络时,比较多的工作花费在了anchor assignment,即实现anchors与ground truth box之间的匹配。faster R-CNN中主要使用的anchor与ground truth box之间的IoU来实现。对于M个anchors和N个round truth boxes,两两之间分别计算IoU,可以得到MxN的IoU_Match矩阵,取每个anchor与N个gt boxes IoU最大的box作为与anchor匹配的Ground Truth Box,如此找到了每个anchor对应的Ground Truth Box。再根据两者之间的IoU,判断其是背景bg还是前景fg即是否有物体,判断方式通常是设者IoU_Threshold_Low和IoU_Threshold_High,IoU大于IoU_Threshold_High的是positive,小于IoU_Threshold_Low的是negative,介于两者之间的忽略。通过这样定义可以知道一个ground truth box可以对应多个anchor。初步判断出positive/negative anchors之后,还需经过超参数每个图像中训练最多使用的anchor box数量和其中positive anchors fraction对anchors再次处理,限制参与训练的anchor box不多于超参数最大数量,见detectron2 rpn.py中的label_and_sample_anchors函数 (opens new window)。
def label_and_sample_anchors(
self, anchors: List[Boxes], gt_instances: List[Instances]
) -> Tuple[List[torch.Tensor], List[torch.Tensor]]:
anchors = Boxes.cat(anchors)
gt_boxes = [x.gt_boxes for x in gt_instances]
image_sizes = [x.image_size for x in gt_instances]
del gt_instances
gt_labels = []
matched_gt_boxes = []
for image_size_i, gt_boxes_i in zip(image_sizes, gt_boxes):
"""
image_size_i: (h, w) for the i-th image
gt_boxes_i: ground-truth boxes for i-th image
"""
match_quality_matrix = retry_if_cuda_oom(pairwise_iou)(gt_boxes_i, anchors)
matched_idxs, gt_labels_i = retry_if_cuda_oom(self.anchor_matcher)(match_quality_matrix)
# M个anchors与N个ground truth boxes匹配,得到M个anchors分别对应的ground truth box,找到每个anchor的标签
gt_labels_i = gt_labels_i.to(device=gt_boxes_i.device)
del match_quality_matrix
if self.anchor_boundary_thresh >= 0:
# Discard anchors that go out of the boundaries of the image
# NOTE: This is legacy functionality that is turned off by default in Detectron2
anchors_inside_image = anchors.inside_box(image_size_i, self.anchor_boundary_thresh)
gt_labels_i[~anchors_inside_image] = -1
# A vector of labels (-1, 0, 1) for each anchor
# 根据超参数,限制每张图像中参与训练的anchors上限和positive anchor的比例
gt_labels_i = self._subsample_labels(gt_labels_i)
if len(gt_boxes_i) == 0:
# These values won't be used anyway since the anchor is labeled as background
matched_gt_boxes_i = torch.zeros_like(anchors.tensor)
else:
# TODO wasted indexing computation for ignored boxes
matched_gt_boxes_i = gt_boxes_i[matched_idxs].tensor
gt_labels.append(gt_labels_i) # N,AHW
matched_gt_boxes.append(matched_gt_boxes_i)
return gt_labels, matched_gt_boxes
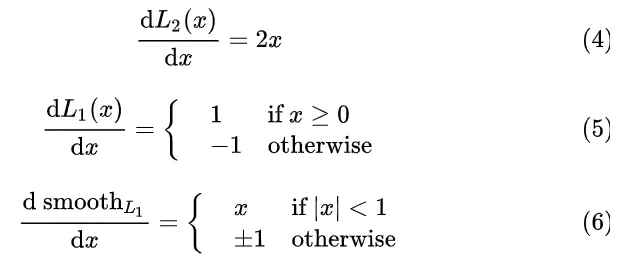
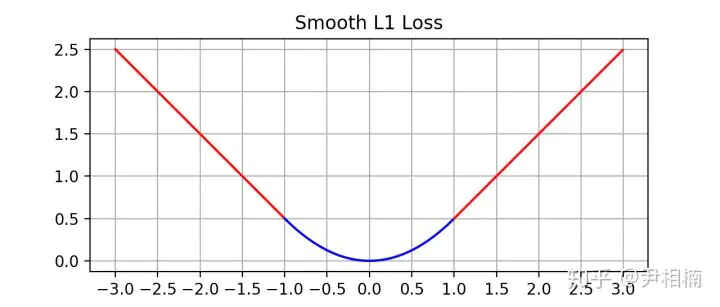
损失函数
- 位置回归使用的是
smooth L1 loss,通过positive mask实现只取target positive anchor和对应的predicted anchors计算regressive loss
- 分类损失使用的是
binary cross entropy loss,只取positive/negative target loss计算。
def losses(
self,
anchors: List[Boxes],
pred_objectness_logits: List[torch.Tensor],
gt_labels: List[torch.Tensor],
pred_anchor_deltas: List[torch.Tensor],
gt_boxes: List[torch.Tensor],
) -> Dict[str, torch.Tensor]:
num_images = len(gt_labels)
gt_labels = torch.stack(gt_labels) # (N, sum(Hi*Wi*Ai))
# Log the number of positive/negative anchors per-image that's used in training
pos_mask = gt_labels == 1
num_pos_anchors = pos_mask.sum().item()
num_neg_anchors = (gt_labels == 0).sum().item()
storage = get_event_storage()
storage.put_scalar("rpn/num_pos_anchors", num_pos_anchors / num_images)
storage.put_scalar("rpn/num_neg_anchors", num_neg_anchors / num_images)
localization_loss = _dense_box_regression_loss(
anchors,
self.box2box_transform,
pred_anchor_deltas,
gt_boxes,
pos_mask,
box_reg_loss_type=self.box_reg_loss_type,
smooth_l1_beta=self.smooth_l1_beta,
)
valid_mask = gt_labels >= 0
objectness_loss = F.binary_cross_entropy_with_logits(
cat(pred_objectness_logits, dim=1)[valid_mask],
gt_labels[valid_mask].to(torch.float32),
reduction="sum",
)
normalizer = self.batch_size_per_image * num_images
losses = {
"loss_rpn_cls": objectness_loss / normalizer,
# The original Faster R-CNN paper uses a slightly different normalizer
# for loc loss. But it doesn't matter in practice
"loss_rpn_loc": localization_loss / normalizer,
}
losses = {k: v * self.loss_weight.get(k, 1.0) for k, v in losses.items()}
return losses
在Fast R-CNN论文中,bounding boxes回归使用的就是smooth L1 loss了,与smooth L1的导数在x较小时(0-1)时更敏感,因此可以有更好的收敛效果。