# 19.单目测距原理介绍
根据相机成像的原理,在满足一定约束条件下,理论上是可以根据目标点的像素坐标计算出其对应的深度信息的。
# 相机成像模型的再次介绍
根据,
1.基本相机模型及参数 (opens new window)
2.OpenCV相机标定 (opens new window)
这两部分的介绍,我们可以知道相机的基本模型,其原理本质上还是小孔成像,感光芯片记录下成像信息变成图片来实现的。
现在我们来看下OpenCV相机标定的结果,为了简化介绍,畸变系数这里不再重复介绍,可以参考上面两个博客。
相机标定的内参矩阵为:
相机原始分辨率为:WxH=1920x1080
相机的焦距为2.93mm
相机的感光芯片上像元大小是2.8umx2.8um
根据相机内参的公式:1044.43/1047.87十分接近,这也验证了相机模型的正确性。
# 单目测距的几何原理
单目测距的几何原理可以借用下面这张图来做介绍:
reference:
https://zhuanlan.zhihu.com/p/664389534 (opens new window)
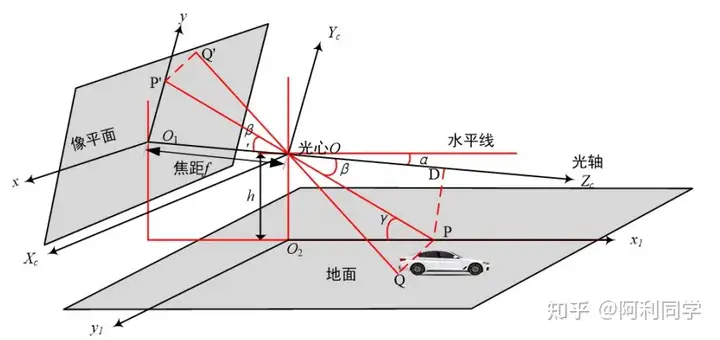
参考上图:
像平面是相机的成像平面,也就是感光芯片所在的平面。
光心O处的坐标系{C}是相机所在的坐标系,点Z_c共线,线
相机的光心
在X轴Y轴在待测对像所在平面建立坐标系
待测对像上的目标点为
目标点Q向坐标系X轴做垂线,得点P,连接OP其和像平面的Y轴交于点Y轴的垂足。
记
求得
以上就求出了目标点Q在坐标系X轴上的坐标。
再来看Y轴上的坐标:
根据三角形PQ的长度为:
如上,就可以求出目标点Q在坐标系Y轴上的坐标。
值得注意的是:
以上仅考虑了投影点出现在图像平面第二象限的情况,如果目标点在图像平面的第三/四象限,还需对计算结果符号进行调整。
计算中涉及到除法,还需考虑除以零的情况。
# reference
← 使用矩阵计算卷积